Главная › DroneFlight Detector - Документация
Инструкция по эксплуатации программного обеспечения «DroneFlight Detector»
Версия: 1.0.0
СОДЕРЖАНИЕ
2. Функциональные характеристики
3. Требования к программно-аппаратному обеспечению
4. Предварительная настройка окружения
5. Установка «DroneFlight Detector»
6. Настройка «DroneFlight Detector»
7. Эксплуатация ПО «DroneFlight Detector»
7.1. Описание входных данных ПО «DroneFlight Detector»
7.2. Описание выходных данных ПО «DroneFlight Detector»
Термины и определения
ПК - персональный компьютер;
ОС - операционная система;
ПО - программное обеспечение;
Docker - открытая программная платформа для разработки, доставки и запуска приложений в изолированных контейнерах;
БпЛА - беспилотный летательный аппарат;
GSD (Ground Sample Distance) - расстояние на местности, занимаемое одним пикселем на аэрофотоснимке;
GNSS (ГНСС) - глобальная навигационная спутниковая система.
1. Общие сведения
Программное обеспечение «DroneFlight Detector» предназначено для обработки данных, полученных при проведении поисково-спасательных операций людей в природной среде с применением аэрофотосъёмки. ПО выполняет обработку снимков, нейросетевое детектирование объектов поиска, определение GNSS-координат найденных объектов.
ПО «DroneFlight Detector» использует GPU (NVIDIA CUDA).
После установки ПО способно работать автономно (без доступа к сети Интернет).
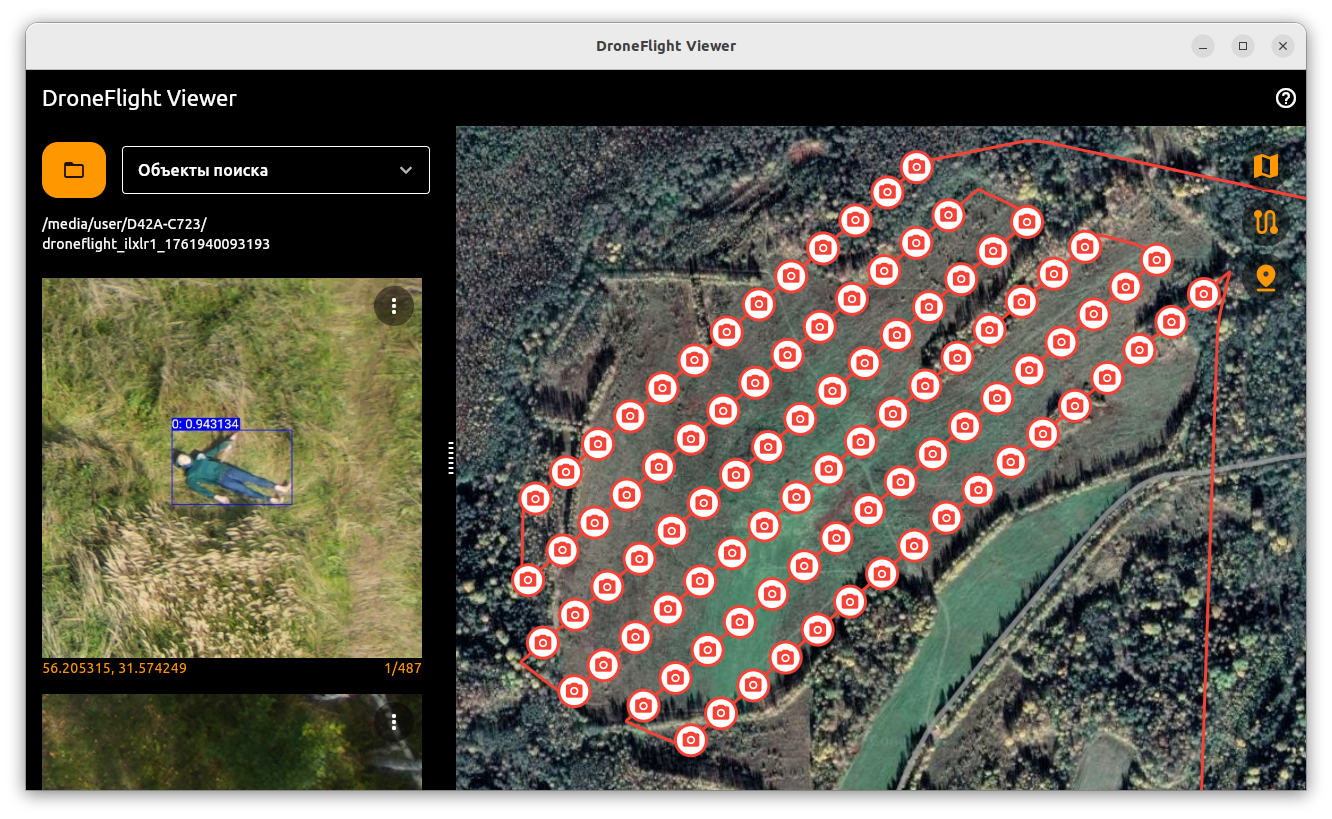
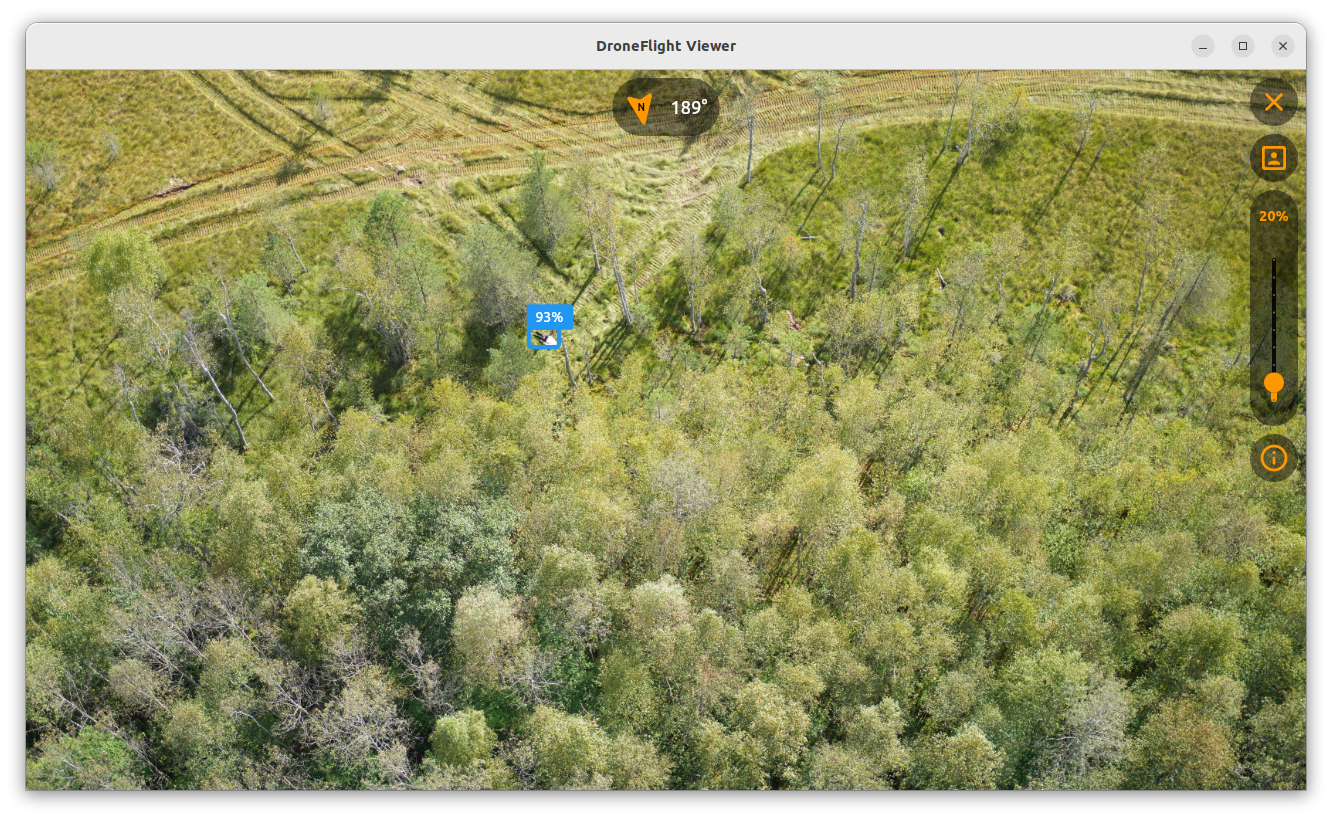
ПО является консольным приложением (не имеет графического интерфейса). Для визуального анализа данных, полученных в результате работы ПО «DroneFlight Detector», используется ПО «DroneFlight Viewer».
2. Функциональные характеристики
ПО «DroneFlight Detector» обладает следующим функционалом:
ПО разработано для использования на GPU (NVIDIA CUDA);
автономная работа (не требует подключения к сети Интернет);
выполняет обработку входных данных: аэрофотоснимков и трека в формате GPX (при наличии);
выполняет нейросетевое детектирование объектов поиска с определением их GNSS-координат;
формирует результаты для просмотра в ПО «DroneFlight Viewer».
3. Требования к программно-аппаратному обеспечению
3.1. Требования к программному обеспечению
Запуск ПО «DroneFlight Detector» выполняется в рамках Docker-контейнера.
ПО разрабатывалось в рамках следующего окружения:
ОС: Linux (Ubuntu 22), Windows (11);
Docker (29.1.2).
3.2. Требования к аппаратному обеспечению
Минимальные требования к аппаратному обеспечению:
NVIDIA 6GB VRAM;
4 CPU;
4GB RAM;
64GB SSD/HDD.
4. Предварительная настройка окружения
ПО «DroneFlight Detector» использует графический процессор. Требуется предварительно выполнить установку пакета NVIDIA CUDA.
4.1. Предварительная настройка окружения для ОС Linux
Для запуска ПО «DroneFlight Detector» требуется Docker. Для установки и настройки Docker для ОС Linux необходимо следовать официальной документации:
Также требуется установка пакета nvidia-container:
Для работы с 7z-архивами требуется установка пакета p7zip-full:
4.2. Предварительная настройка окружения для ОС Windows
Для запуска ПО «DroneFlight Detector» требуется Docker. Для установки и настройки Docker для ОС Windows необходимо следовать официальной документации:
Для работы с 7z-архивами требуется установить приложение 7-Zip.
5. Установка «DroneFlight Detector»
Работа приложения выполняется в рамках базового Docker-образа из репозитория DockerHub (https://hub.docker.com/u/droneflightru): droneflightru/droneflight-detector-cuda:1.0.0.
Выполнение загрузки базового Docker-образа:
Пример отображения списка Docker-образов:
Далее для установки ПО «DroneFlight Detector» достаточно распаковать архив droneflighdetector_cuda_1.0.0.7z с указанием пароля.
Пароль к архиву droneflighdetector_cuda_1.0.0.7z доступен в файле CREDENTIALS.txt.
Извлечение архива для ОС Linux:
Для извлечения архива в ОС Windows требуется правой кнопкой на архиве droneflightdetector_cuda_1.0.0.7z нажать Показать дополнительные параметры / 7-Zip / Распаковать здесь.
Установка ПО «DroneFlight Detector» завершена.
6. Настройка «DroneFlight Detector»
Структура файлов для droneflighdetector_cuda_1.0.0.7z должна выглядеть следующим образом:
, где
data/bin/droneflightdetector -исполняемый файл ПО «DroneFlight Detector»;
data/droneflightdetector_model_1.0.0.engine - модель в формате TensorRT;
data/fonts/roboto/Roboto-Regular.ttf - шрифт;
data/run_zenmusep1_35mm.sh - пример скрипта для запуска ПО «DroneFlight Detector» для DJI Zenmuse P1 с объективом 35мм;
input/photos - директория с оригинальными снимками для обработки;
input/track.gpx - трек полёта в формате GPX (при наличии);
output - директория с результатами работы ПО «DroneFlight Detector»;
droneflightdetector_zenmusep1_35mm.bat - пример скрипта для запуска ПО «DroneFlight Detector» в Docker-контейнере для ОС Windows для DJI Zenmuse P1 с объективом 35мм;
droneflightdetector_zenmusep1_35mm.sh - пример скрипта для запуска ПО «DroneFlight Detector» в Docker-контейнере для ОС Linux для DJI Zenmuse P1 с объективом 35мм.
Описание входных параметров ПО «DroneFlight Detector»:
focal_length - фокусное расстояние объектива (в миллиметрах);
sensor_width - ширина сенсора камеры (в миллиметрах);
sensor_height - высота сенсора камеры (в миллиметрах);
photo_width - ширина фото (в пикселях);
photo_height - высота фото (в пикселях);
slice_overlap_width_ratio - перекрытие слайсов по ширине;
slice_overlap_height_ratio - перекрытие слайсов по высоте;
font_path - путь к шрифту;
model_path - путь к файлу модели;
in_dir - путь к входной директории;
out_dir - путь к директории результатов;
archive - флаг архивирования результатов;
threshold - пороговое значение модели при определении объектов поиска;
log_level - уровень логирования (trace, debug, info, warn, error, critical, off).
Входные параметры задаются в скрипте: data/run_zenmusep1_35mm.sh.
Содержимое скриптов может редактироваться в зависимости от параметров используемого оборудования.
7. Эксплуатация ПО «DroneFlight Detector»
Для эксплуатации ПО «DroneFlight Detector» требуется выполнить предварительную установку и настройку ПО.
7.1. Описание входных данных ПО «DroneFlight Detector»
Структура входных данных:
, где
input/photos - директория с оригинальными снимками для обработки;
input/track.gpx - трек полёта в формате GPX (при наличии).
7.2. Описание выходных данных ПО «DroneFlight Detector»
Структура выходных данных:
, где
output/droneflight_detector_1.0.0_{time} - директория с результатами работы ПО «DroneFlight Detector»;
output/droneflight_detector_1.0.0_{time}.zip - архив директории с результатами работы ПО «DroneFlight Detector»;
output/droneflight_detector_1.0.0_{time}.zip.sha256.txt - контрольная сумма архива директории с результатами работы ПО «DroneFlight Detector»;
output/droneflight_detector_1.0.0.log - лог-файл работы ПО «DroneFlight Detector».
Структура директории с результатами работы ПО «DroneFlight Detector»:
detections - директория изображений с найденными объеками;
photos - оригинальные снимки;
previews - превью оригинальных снимков;
results.fb - файл с метаданными в формате FlatBuffers.
7.3. Запуск ПО «DroneFlight Detector» для ОС Linux
Для запуска ПО «DroneFlight Detector» требуется перейти в директорию с установленным ПО:
и запустить скрипт, например:
7.4. Запуск ПО «DroneFlight Detector» для ОС Windows
Для запуска ПО «DroneFlight Detector» требуется перейти в директорию с установленным ПО:
и запустить скрипт, например:
8. Просмотр результатов ПО «DroneFlight Detector»
Для просмотра результатов ПО «DroneFlight Detector» используется ПО «DroneFlight Viewer»: